Matrix
Table of contents
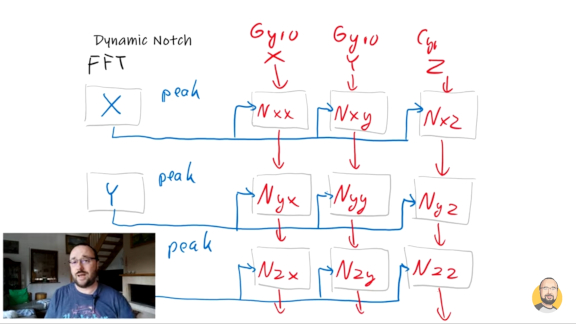
Dynamic Filter on Gyro
- The gyro Dynamic_Filter in EmuFlight 0.3.X (a.k.a. Matrix) is a per-axis dynamic gyro notch written by Paweł Spychalski.
- 0.4.0+ upgrades the dynamic_filter in part with code from KarateBrot and calculations from QuickFlash
Tuning
- EmuFlight stock defaults are fair for a 5” standard-frame quadcopter, but generally over-filter.
- Defaults have dynamic_filter enabled as well as 2 dTerm LPF’s, which again may be overfiltering. (Helio is disabled by default.)
- The goal of filter tuning is to have a quad-specific tune that is neither over-filtered nor under-filtered.
Many options (0.3.X+)
- dynamic_filter may placed over the motor-noise spikes to remove dTerm noise from gyro; However,
- dynamic_filter may also be placed above motor-noise spike to clean-up only high frequency noise.
- Often it is found that with dynamic_filter enabled, only one dTerm LPF is required.
- Prior to 0.4.0, it was found that with dynamic_filter disabled, two dTerm LPF’s were preferred if not required. (But this may vary with different aircraft, especially on Helio/Strix.)
- With 0.4.0+, dynamic dTerm notches may be enabled as the primary dTerm filter. It seems a single dTerm LPF still helps in this situation, but allows for a much higher cutoff.
Variables and Values
- Enable:
feature dynamic_filter; Disable:feature -dynamic_filter - Q (
dynamic_gyro_notch_q) - Width of the dynamic per-axis notches. Higher value is a narrower notch, while smaller values are a wider notch. Smaller values (wider notches) are more latent than larger values (narrower notches). Range: 1-1000. Default:350. dynamic_gyro_notch_countRange 1-5, Default 3. (0.4.0+)- Min (
dynamic_gyro_notch_min_hz) is the lowest value that a notch’s cutoff may exist. Range: 30-1000. Default:150. - Max (
dynamic_gyro_notch_max_hz) [0.3.2+ / CLI only] is the highest value that a cutoff may exist. 0.4.0-Range is 400-1000. 0.3.0-Range is 600-1000. Default:600.
Dynamic Filter on D-Term
- uses the analysis of the gyro dynamic filter to apply d-Term notches
dterm_dyn_notch_enableRange ON, OFF. Default OFF.dterm_dyn_notch_qRange 1-1000, Default 400.
“Q” Example Graphic
 Q (
Q (dynamic_gyro_notch_q) is a width. (note*: graphical representation only, not necessarily actual size.)
Dynamic Filter was formerly “Matrix”
- Matrix Introduction, by Paweł: https://youtu.be/7s8ZeP135uI
- How it Works, by Paweł: https://youtu.be/w0QsVIXYWCE