Motor Mixers and Thrust Linearization
Table of contents
Motor Mixers and Thrust Linearization
0.4.0+
The new mixers and linearizations are independent functions but may be used together to provide a preferred fly-style. Code and ideas from Tyler Corleone and QuickFlash.
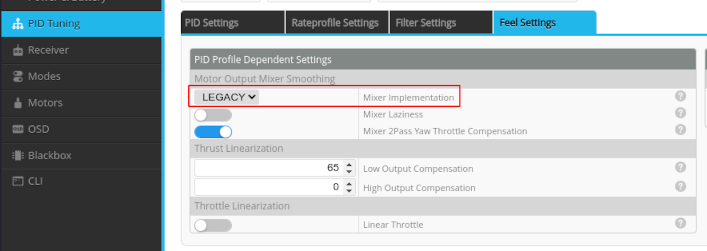
Motor Output Mixer - Options for the controller’s motor output. New smooth variants change how the axes are mixed with throttle.
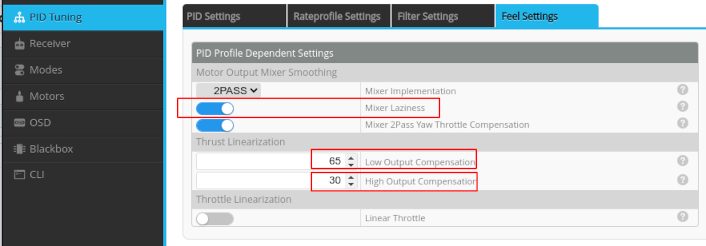
LEGACYis the mixer we have always had. (Note: for 100% legacy-mode,linear_throttleshould beOFFandlinear_thrust_high_outputshould be0; However, pilots are welcome to use both Thrust-Linearization and Throttle-Linearization.)SMOOTHis a simple variant that applies smoother transitions to avoid mixer-output clipping.2PASSis a SMOOTH variant that mixes yaw and roll/pitch separately in order to try to guarantee thrust linearity for roll and pitch and motor output linearity (almost RPM linearity) for yaw.mixer_lazinessON/OFF. When ON, requires Thrust-Linearization values configured (>0). Both SMOOTH and 2PASS can use an option called “laziness” that enables a smarter “clipping prevention” strategy, that is called lazy because it adds only the minimum required amount of offset to remain in the [0, 1] for each “motor group” (that is a group of opposite motors that can actually work in conjunction in order to obtain a certain amount of roll/pitch) instead of applying the biggest needed amount. In this way we avoid to add/increase the total thrust when not needed, obtaining a better “throttle authority”.mixer_yaw_throttle_compcompensate throttle for increased motor output during aggressive yaw maneuvers. This option applies only to2PASS.LEGACYdoes not suffer from the issue.SMOOTHstill suffers from the issue.
# get mixer
mixer_impl = 2PASS
Allowed values: LEGACY, SMOOTH, 2PASS
Default value: 2PASS
mixer_laziness = ON
Allowed values: OFF, ON
Default value: OFF
mixer_yaw_throttle_comp = ON
Allowed values: OFF, ON
Select the Mixer Implementation here:
Thrust Linearization - Compensation for inherent non-linearity of thrust and rpm of motor output.
- Two settings:
linear_thrust_low_outputfor low motor output (low RPM) andlinear_thrust_high_outputfor high motor output (high RPM). Use this tool to understand what you need to set (65/30 are good starting points for low and high output) https://www.desmos.com/calculator/ofaiocun0b - Both values need to be != 0 (not zero) for TL being applied.
linear_throttlegives you a linear throttle/thrust feeling. The hovering level will be lower (e.g. what before was 30% now could be 20%). This means that you need to be used to this before you can appreciate its advantages (more room on the upper part of the throttle)- TPA is automatically disabled when TL is enabled because it already solves high throttle issues.
# get linear
linear_thrust_low_output = 65
Allowed range: 0 - 100
linear_thrust_high_output = 30
Allowed range: 0 - 100
Default value: 0
linear_throttle = ON
Allowed values: OFF, ON
Default value: OFF
For more information, please see all notes, graphs and discussions in the Pull Request: https://github.com/emuflight/EmuFlight/pull/398
To enable Thrust Linear, these three items must be set:
Suggested starting values for Thrust Linearization:
- When over-propping, lower these values some points.
- When under-propping, raise these values some points.
- Such will affect
linear_thrust_low_outputmore. Tune values as needed based on P-Term overshoot or undershoot.
| Make/Model | Size | TL Low | TL High |
|---|---|---|---|
| NewBeeDrone Brushed Gold | 19700kv | 70 | 45 |
| NewBeeDrone Brushed Unicorn | 25500kv | 70 | 45 |
| Generic | 1102 | 45 | 30 |
| DongXingWei | 1103 8000kv | 40 | 25 |
| Generic | 1105 | 75 | 35 |
| Amax | 1105 5800kv-GF2540 | 82 | 49 |
| EMAX | 1106 6000kv-GF3035 | 85 | 10 |
| T-motor F15 | 1106 6000kv HQ2525 | 90 | 45 |
| Tachyon | 1108 5000kv GF3035 | 95 | 42 |
| FPVCycle | 1202 6300kv HQ3x2 | 65 | 10 |
| iFlightXing | 1202 8000kv | 75 | 35 |
| iFlightXing | 1204 4500kv GF3025 | 92 | 56 |
| iFlightXing | 1206 6500kv GF2540 | 80 | 80 |
| FPVCycle | 1303 5200kv HQ3x2 | 94 | 34 |
| EMAX | 1306 4000kv GF3035 | 93 | 87 |
| BetaFPV | 1404 3800kv GF3025 | 95 | 95 |
| HypeTrainBRAT | 1407 4140kv HQ2525 | 95 | 75 |
| BetaFPV | 1505 3600kv GF3025 | 95 | 95 |
| BetaFPV | 1805 1550kv 6S | 95 | 76 |
| BetaFPV | 2004 1700kv 6S | 69 | 90 |
| ZoeFPV | 2010 | 60 | 25 |
| Proton X | 2204 | 50 | 0 |
| SunnySky | 2204 | 50 | 0 |
| RCX V2 | 2205 | 50 | 15 |
| RCINPower | 2205 | 60 | 15 |
| ZoeFPV | 2205 | 60 | 5 |
| iFlight Xing | 2206 | 60 | 30 |
| T-Motor Blackbird | 2207 | 60 | 15 |
| Pyrodrone Hyperlite | 2207.5 | 60 | 25 |
| Flywoo | 2207.5 1860kv | 40 | 20 |
| FlashHobby Arthur | 2207.5 1900kv | 60 | 30 |
| Pyrodrone Hyperlite | 2208.5 | 55 | 25 |
| AmaxInno | 2305 | 63 | 25 |
| NewBeeDrone Smoov | 2306 2400kv | 60 | 15 |
| LeDrib | 2306 | 65 | 15 |
| AmaxInno | 2306 | 65 | 40 |
| iFlight Xing | 2306 | 75 | 30 |
| NewBeedrone Flow | 2306.5 | 70 | 30 |
| T-motor BMS | 2306.5 2000kv | 60 | 29 |
| Bardwell | 2407 | 65 | 30 |
| HGLRC FD | 2408 | 70 | 25 |
| T-Motor F80 | 2408 | 75 | 45 |
| T-Motor F90 | 2806.5 | 70 | 60 |
| Emax Eco II | 2807 | 75 | 95 |
* Credit to Ryan Harrel (MiniQuad Bench Test), Ethan Bayer (Micro Motor Test Lab) for the thrust curve data from which these values were derived. Thanks to DrSchnickistein and EmuTestBandits for value recommendations.
@nerdCopter Tip: Recommend LEGACY or SMOOTH for cinematic aircraft. Recommend LEGACY or 2PASS+Laziness for racing and freestyle. Recommend tuned Thrust-Linearization (Use the table for deducing good values and tune as needed). Throttle-Linearization will depend on the aircraft and pilot preference as the throttle hover-point may be reduced too much on some craft.